Etape şi Activităţi
Etapa 1 - Studii teoretice privind structurile microrobotice pentru aplicații bio-medicale, proiectarea și dezvoltarea platformei (Sistem microrobotic mobil pentru manipularea / sortarea de organisme unicelulare)
Act 1.1. Studiul sistemelor de micromanipulare pentru aplicații bio-medicale.
Act 1.2. Studiul sistemelor microrobotice pentru aplicații bio-medicale.
Act 1.3. Studiul opțiunilor de microfabricare
Act 1.4. Stabilirea metodelor de obținere a obiectivelor
Act 1.5. Simularea principalelor componente ale sistemului microrobotic
Act 1.6. Proiectarea sistemului microrobotic mobil pentru manipularea / sortarea de organisme unicelulare
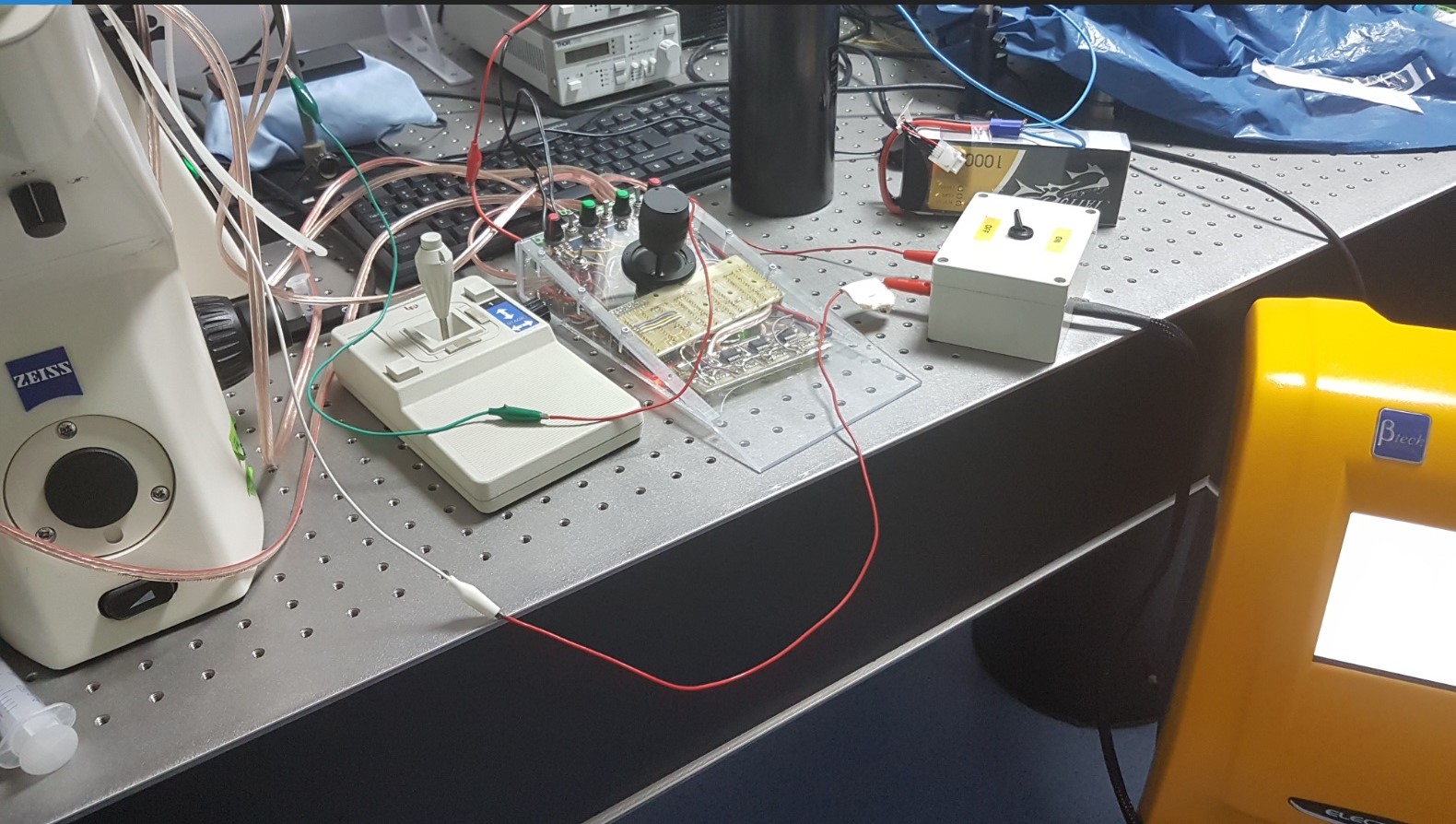
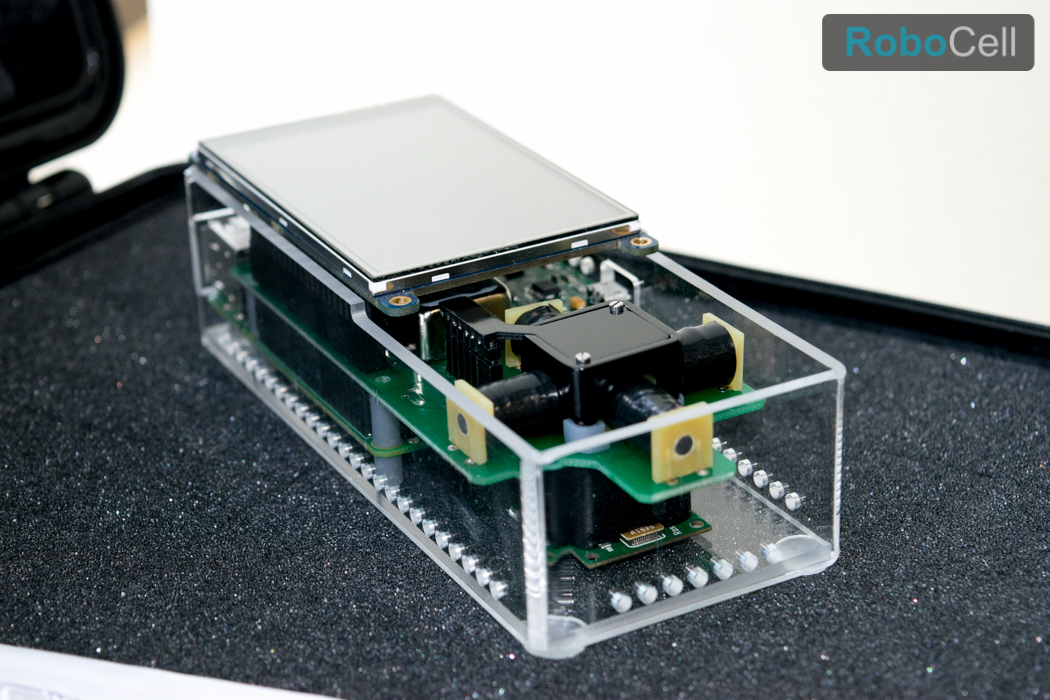
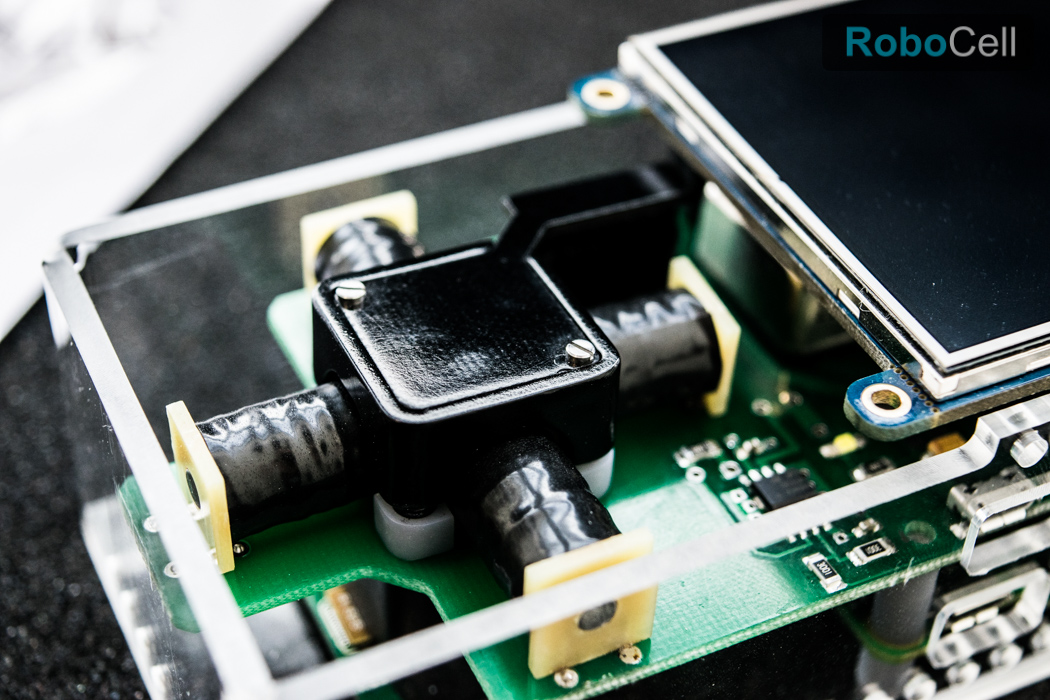
Act 1.7. Realizarea sistemului microrobotic mobil pentru manipularea / sortarea de organisme unicelulare
Act 1.8. Diseminare şi alte activităţi suport
Etapa 2 - Testarea sistemului microrobotic mobil pentru manipularea / sortarea de organisme unicelulare
Act 2.1. Realizarea algoritmului de control avansat
Act 2.2. Testare şi optimizare locală
Act 2.3. Testare şi optimizare in-vitro la UMF Bucureşti
Act 2.4. Diseminare şi alte activităţi suport
Rapoarte de etapa și Raportul final:
1. Raport ST - Etapa 1 *
2. Raport ST - Etapa 2 *
3. Raport Final *
* - Fișier parolat. Pentru obținerea parolelor se va contacta directorul de proiect la adresa de e-mail: drg_florin@yahoo.com
Rezultate
I. Conceptul sistemului microrobotic proiectat și dezvoltat în cadrul proiectului a fost prezentat la conferințe naționale și internaționale, organizate atât în țară cât și în străinătate:
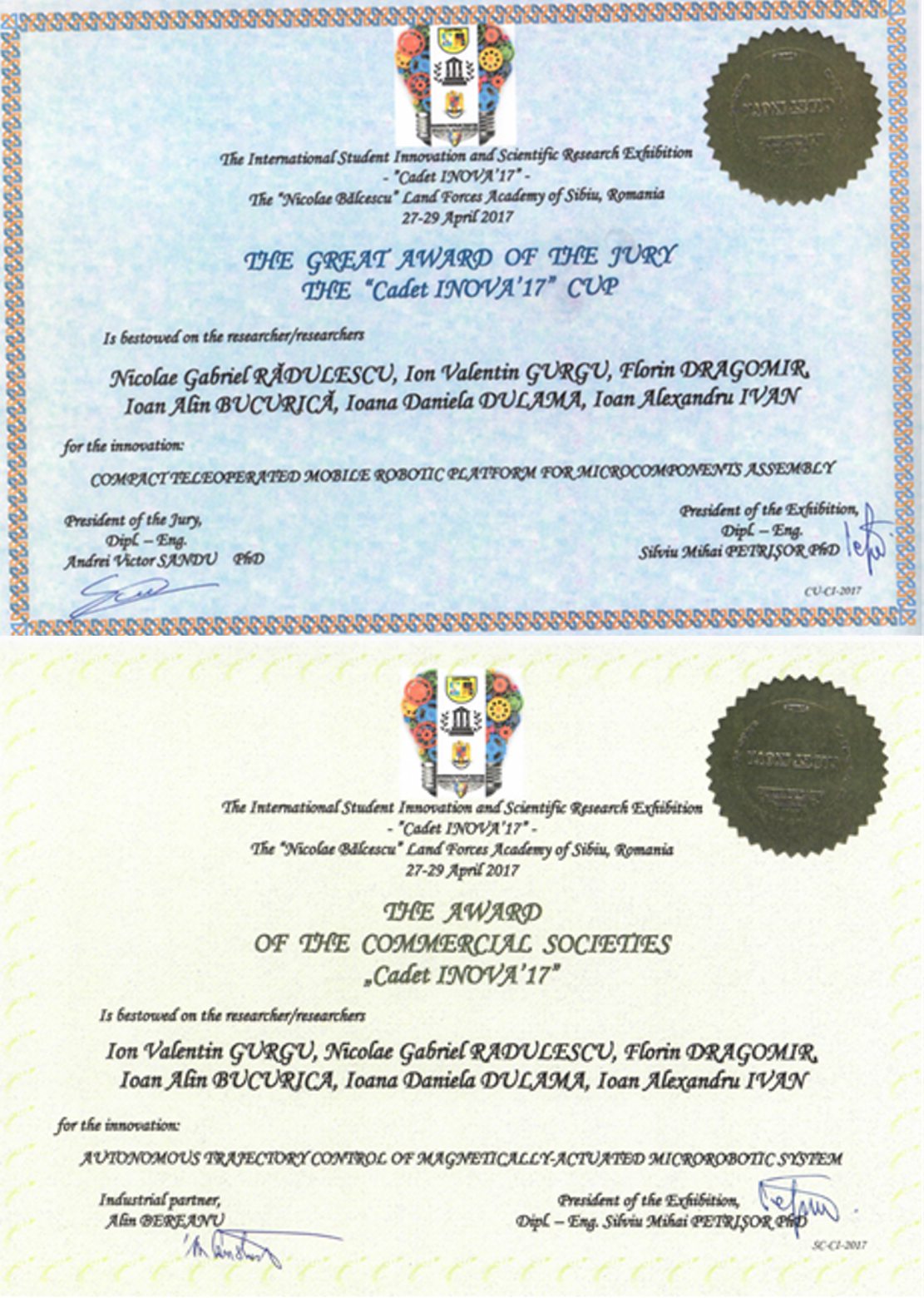
1. Salonul Internaţional al Inovării şi Cercetării Ştiinţifice Studenţeşti - ”Cadet INOVA’17”, organizat de Academia Forţelor Terestre “Nicolae Bălcescu” din Sibiu în perioada 27-29 Aprilie 2017, prin cele două lucrări prezentate:
- Compact teleoperated mobile robotic platform for microcomponents assembly, Nicolae Gabriel RĂDULESCU, Ion Valentin GURGU, Florin DRAGOMIR, Ioan Alin BUCURICĂ, Ioana Daniela DULAMA, Ioan Alexandru IVAN - Lucrare cu care s-a obținut Marele Premiu al Juriului și CUPA “Cadet INOVA’17” pentru inovație / cercetare (http://cadetinova.ro/documente/Premii_Inova_17.pdf);
- Autonomous trajectory control of magnetically-actuated microrobotic system, Ion Valentin GURGU, Nicolae Gabriel RADULESCU, Florin DRAGOMIR, Ioan Alin BUCURICA, Ioana Daniela DULAMA, Ioan Alexandru IVAN - Lucrare cu care s-a obținut Premiul Societăţilor Comerciale “Cadet INOVA’17” pentru inovație / cercetare (http://cadetinova.ro/documente/Premii_Inova_17.pdf)


2. International Conference on Robotics & Automation 2017, Singapore, 29 mai – 3 iunie 2017:
- Mobile microrobotic system, Ioan Alexandru IVAN, Florin DRAGOMIR, Ion Valentin GURGU, Ioana Daniela DULAMĂ, Ioan Alin BUCURICĂ, Nicolae Gabriel RĂDULESCU - Lucrare prezentată în cadrul concursului 2017 Mobile Microrobotics Challenge (MMC 2017) la secțiunea „MMC Showcase & Poster Session”

3. The 20th World Congress of the International Federation of Automatic Control, Toulouse, 9-14 iulie 2017, în cadrul „Automatic Control Demonstrators”:
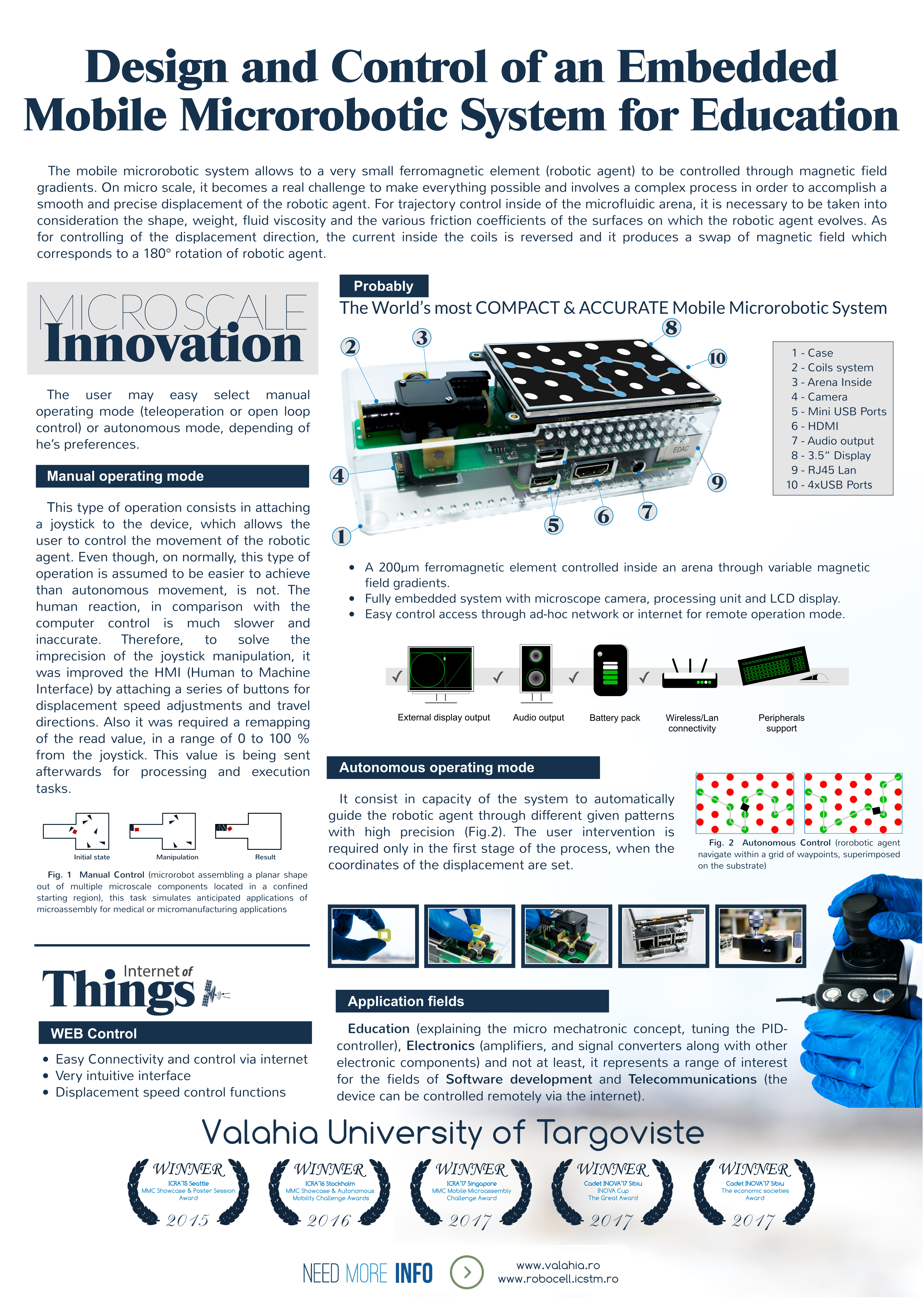
- Design and control of an embedded mobile microrobotic system for education, Ioan Alexandru IVAN, Ion Valentin GURGU, Nicolae Gabriel RĂDULESCU, Florin DRAGOMIR, Mihaela IVAN, Ioana Daniela DULAMĂ, Ioan Alin BUCURICĂ, Rosario Toscano. Proceedings of the IFAC 2017 World Congress, Toulouse, France, 2017. - http://laris.univ-angers.fr/_resources/IFAC2017/IFAC_Paper_4297.pdf

4. International Electric & Automation Show, București, 19-22 septembrie 2017, în cadrul secțiuni ”Inovare Tehnică”:
- Design and control of an embedded mobile microrobotic system, Nicolae Gabriel RĂDULESCU, Ioan Alin BUCURICĂ, Ion Valentin GURGU, Ioana Daniela DULAMĂ, Ioan Alexandru IVAN, Florin DRAGOMIR - Lucrare cu care s-a obținut premiul I pentru creativitate și abordare inovativă, pasiune pentru cercetare și contribuție științifică.

5. Simpozionul cercetării – Universitatea Valahia din Târgoviște, Târgoviște, 27 septembrie 2017:
- Sistem microrobotic mobil pentru manipularea/sortarea de organisme unicelulare, Florin DRAGOMIR, Ioan Alexandru IVAN, Ioana Daniela DULAMA, Ion Valentin GURGU, Ioan Alin BUCURICA, Nicolae Gabriel RADULESCU
6. Conferința de științe spațiale - EDUSPACE, Târgoviște, 4 octombrie 2017:
- Sistem microrobotic mobil pentru manipularea/sortarea de organisme unicelulare, Florin DRAGOMIR, Ioan Alexandru IVAN, Ioana Daniela DULAMA, Ion Valentin GURGU, Ioan Alin BUCURICA, Nicolae Gabriel RADULESCU.
7. International Conference on Robotics & Automation 2018, Brisbane, Australia, 21 - 25 mai 2018:
- Mobile microrobotic system for single-cell manipulation and sorting, Florin DRAGOMIR, Ioan Alexandru IVAN, Ion Valentin GURGU, Ioana Daniela DULAMĂ, Ioan Alin BUCURICĂ, Nicolae Gabriel RĂDULESCU - Lucrare prezentată în cadrul concursului 2018 Mobile Microrobotics Challenge (MMC 2018) la secțiunea „MMC Showcase & Poster Session”
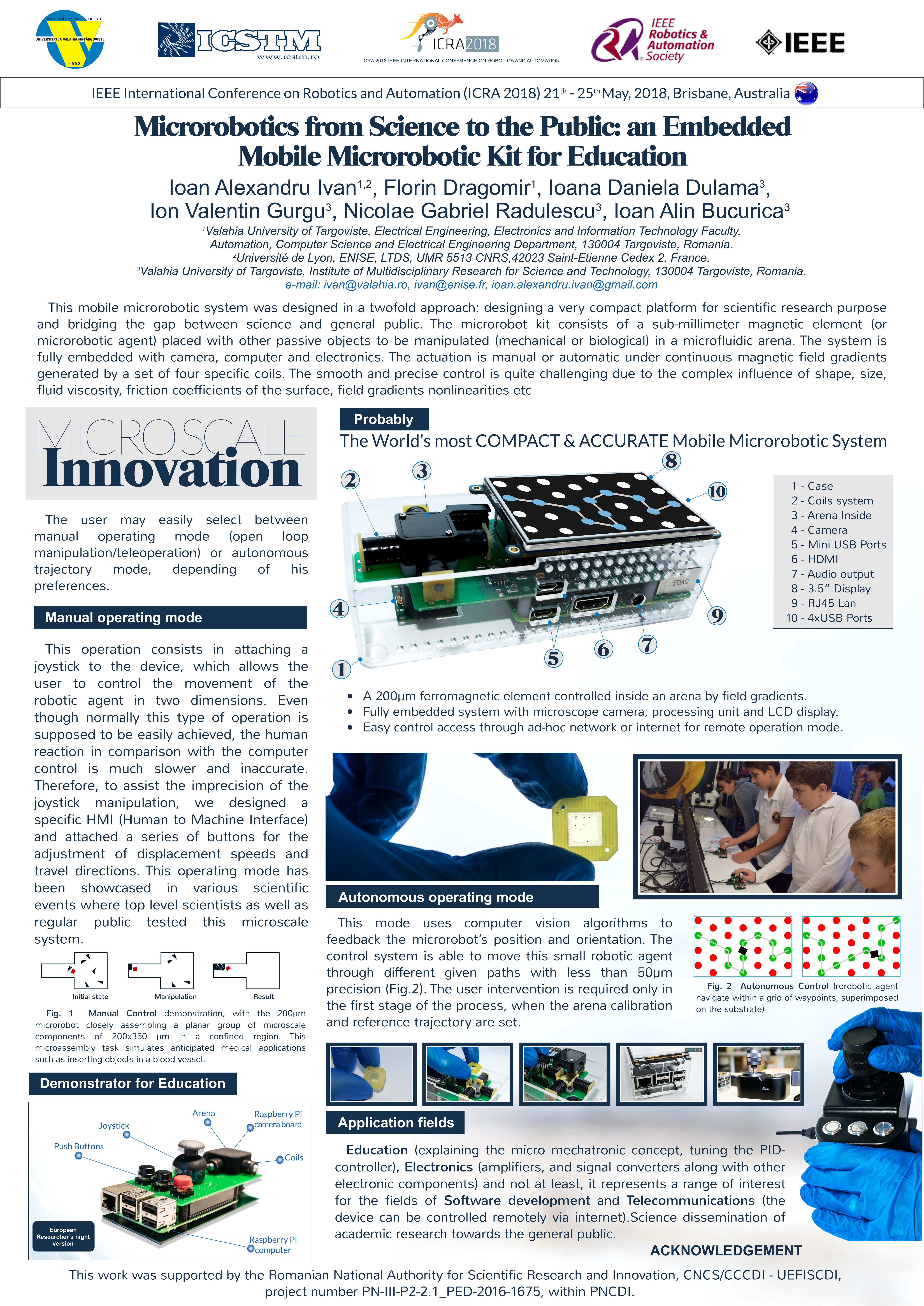
- Microrobotics from Science to the Public: an Embedded Mobile Microrobotic Kit, Ioan Alexandru IVAN, Florin DRAGOMIR, Ioana Daniela DULAMĂ, Ion Valentin GURGU, Nicolae Gabriel RĂDULESCU, Ioan Alin BUCURICĂ - Lucrare prezentată în cadrul Workshop-ului „30 Years of Small-Scale Robotics from Nano-, to Millimeter-Sized Robotic Systems and Applications” - http://www1.ece.uic.edu/~paprotny/posters_abstracts_ICRA2018.pdf ; http://www1.ece.uic.edu/~paprotny/posters_ICRA2018.pdf

II. De asemenea, echipa proiectului a participat de diferite concursuri / competiții și a obținut o serie de premii:
1. Locul I la sectiunea ”Microassembly Challenge” din cadrul concursului ”IEEE 2017 Mobile Microrobotics Challenge (MMC)”, Singapore, 2017 (http://www.icra2017.org/conference/robot-challenges#sub_3). Concursul desfăsurat în 29 mai-3 iunie 2017, la Sands Expo and Convention Centre, in Singapore și organizat în cadrul ICRA2017. Manifestarea s-a desfășurat sub egida institutului IEEE și RAS-MNRA. Competiția dedicată roboticii de precizie la scară micrometrică a reunit universități și centre de cercetare din întreaga lume. Obiectivele acestui concurs de microrobotică au constat în dezvoltarea de soluţii inovative la scara mică, dedicate viitoarelor aplicaţii biomedicale şi nanotehnologiilor.

2. Locul I la sectiunile „Autonomous Mobility & Accuracy Challenge”, „Microassembly Challenge” și „MMC Showcase & Poster Session” din cadrul concursului ”IEEE 2018 Mobile Microrobotics Challenge (MMC)”, Brisbane, Australia, 2018 (https://sites.google.com/site/mobilemicrorboticschallenge/results). Concursul desfăsurat în perioada 21 -25 mai 2018, la Brisbane Convention & Exhibition Centre, in Brisbane și organizat în cadrul ICRA2018. Manifestarea s-a desfășurat sub egida institutului IEEE și RAS-MNRA. Competiția dedicată roboticii de precizie la scară micrometrică a reunit universități și centre de cercetare din întreaga lume. Obiectivele acestui concurs de microrobotică au constat în dezvoltarea de soluţii inovative la scara mică, dedicate viitoarelor aplicaţii biomedicale şi nanotehnologiilor.


3. Finaliști la sectiunile ”Autonomous Mobility & Accuracy Challenge” și ”MMC 2017 Best in Show” din cadrul concursului ”2017 Mobile Microrobotics Challenge (MMC)” https://sites.google.com/site/mobilemicrorboticschallenge/results)
4. Premiul I la secțiunea Start Up din cadrul International Electric & Automation Show 2017, pentru proiectul “Magnetic levitation system to reduce mechanical vibration”, București, 2017 (link).
III. Alte rezultate (articole în jurnale, brevete):
1. Comsol simulation of electromagnetic field required for a microrobot actuation, Florin Dragomir, Ioan Alexandru Ivan, Ion Valentin Gurgu, Nicolae Gabriel Radulescu, Ioan Alin Bucurica, Ioana-Daniela Dulama, Journal of Science and Arts, 2(43), pp. 523-529, 2018

2. S-a depus o cerere de brevet la Oficiul de Stat pentru Invenții și Mărci (O.S.I.M.) cu titlul “Sistem microrobotic mobil pentru manipularea / sortarea de organisme unicelulare”, autori: Ion Valentin GURGU, Florin DRAGOMIR, Nicolae Gabriel RĂDULESCU, Ioana–Daniela DULAMĂ, Ioan Alin BUCURICĂ, Mihaela–Eugenia IVAN, înregistrată cu nr. A / 00693 / 21.09.2017